Insekten haben Fühler, um ihre Umgebung abzutasten. Sie nehmen damit Hindernisse wahr und können Futter und Feinde erkennen.
Für die Hinderniserkennung hat RoBat einen Ultraschallsensor HC SR-04, der die Entfernung zu Objekten bis zu vier Metern messen kann.
In der Praxis stellt man oft fest, dass Hindernisse damit nicht zuverlässig erkannt werden. Stuhl- oder Tischbeine sind zum Beispiel zu schmal für die Erkennung, der Ultraschallsensor „sieht“ sie nicht. Stoff und andere rauhe Oberflächen können den Schall ganz oder teilweise schlucken. Auch dann kann die Entfernung nicht zuverlässig gemessen werden. RoBat macht deshalb immer mehrere Messungen, trotzdem gibt es Situationen, in denen er Hindernisse nicht erkennt.
Wir gucken uns deshalb die Idee der Fühler bei den Insekten ab. Mit den Fühlern kann #RoBat feststellen, wenn er irgendwo gegen fährt. #robot #sensor #antenna #fuehler

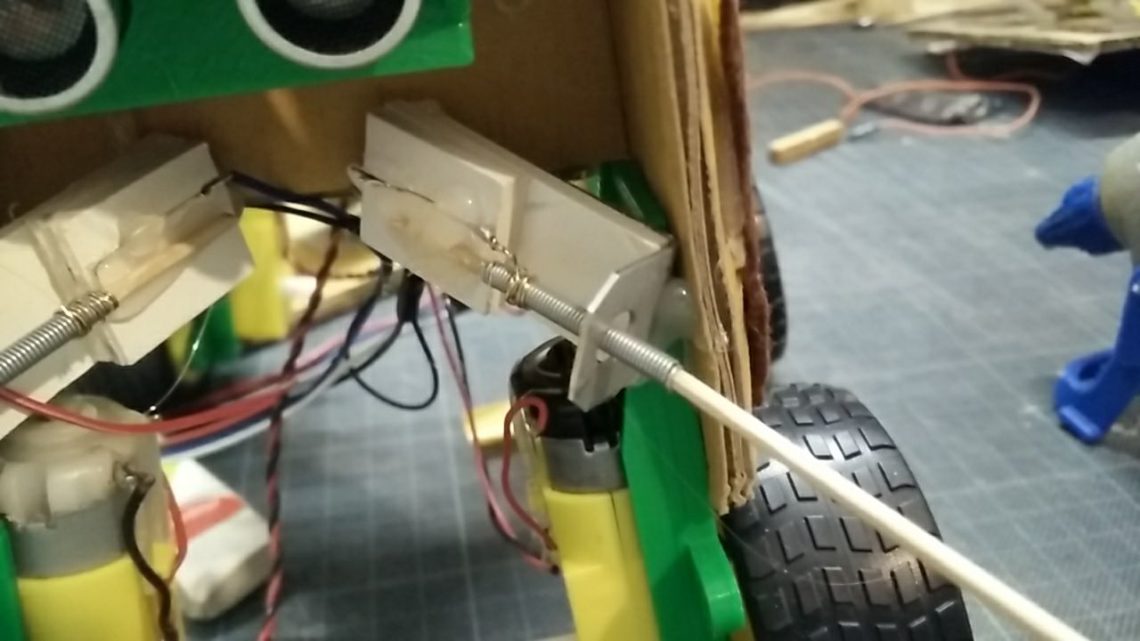
Aus etwas Pappe, einem Stück Lochband, einer Feder und einem Zahnstocher oder Wattestäbchen bauen wir einen einfachen Fühler. Stößt der Fühler gegen ein Hindernis, wird er an der Feder gebeugt und berührt das Lochband. Dadurch wird eine elektrische Verbindung geschaffen, die RoBat wahrnehmen kann.
